diff --git a/content/blog/FTC_2024_-2025_-_une_base_roulante_holonome.en.md b/content/blog/FTC_2024_-2025_-_une_base_roulante_holonome.en.md
index f993c30..584b892 100644
--- a/content/blog/FTC_2024_-2025_-_une_base_roulante_holonome.en.md
+++ b/content/blog/FTC_2024_-2025_-_une_base_roulante_holonome.en.md
@@ -1,8 +1,8 @@
---
title: "FTC 2024 -2025 : an omnidirectional rolling base"
-date: "2024-10-12T19:52:17+02:00"
-lastmod: "2024-10-14T13:56:14+02:00"
-lastupdate: "2024-10-14T13:56:14+02:00"
+date: "2024-10-12T17:52:17+02:00"
+lastmod: "2024-10-14T13:56:58+02:00"
+lastupdate: "2024-10-14T13:56:58+02:00"
author: "coach.francois"
authors: ["coach.francois"]
facebook_author: "false"
@@ -15,41 +15,7 @@ baneer: "https://werobot.fr/posts/macanum2.jpg"
banner: "https://werobot.fr/posts/macanum2.jpg"
draft: false
---
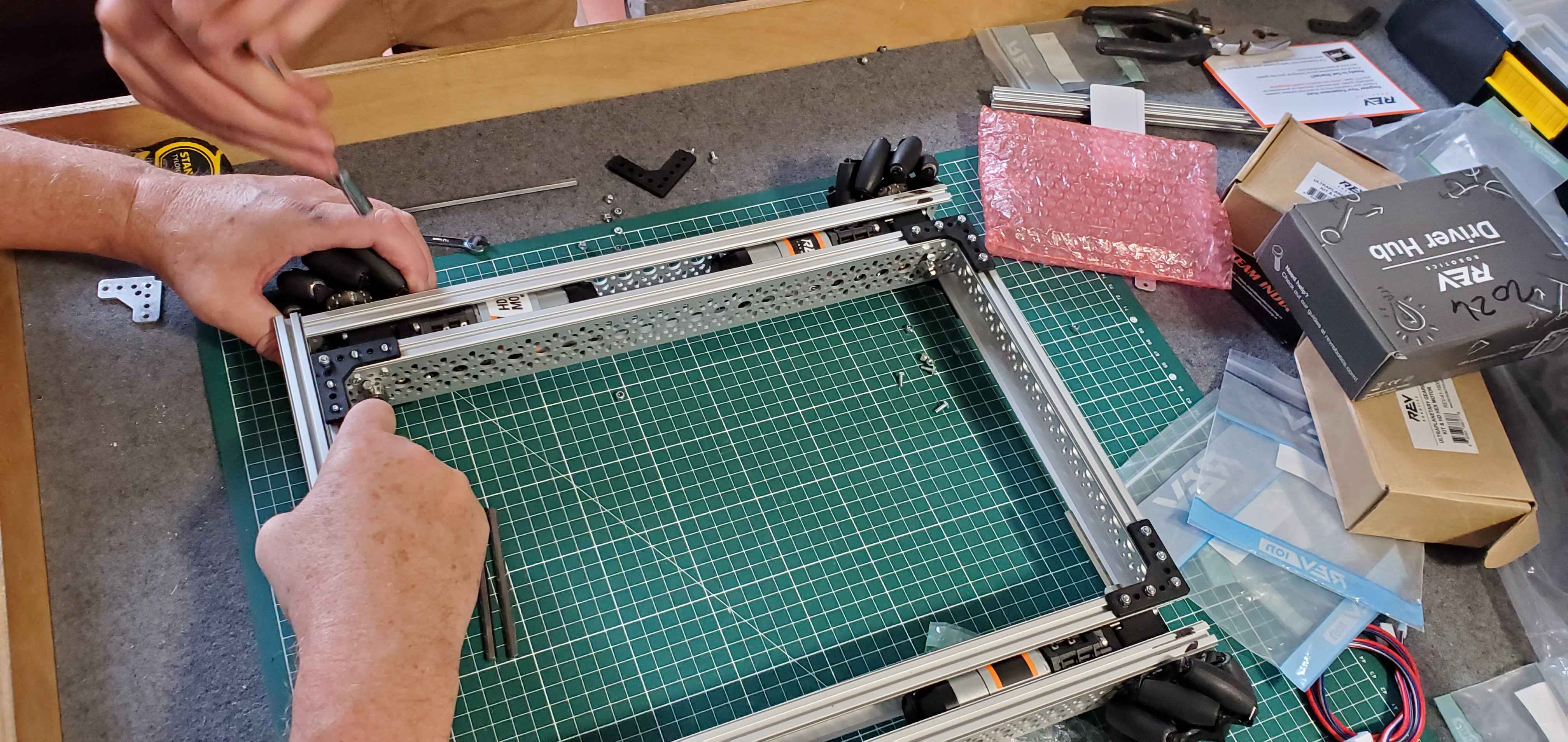
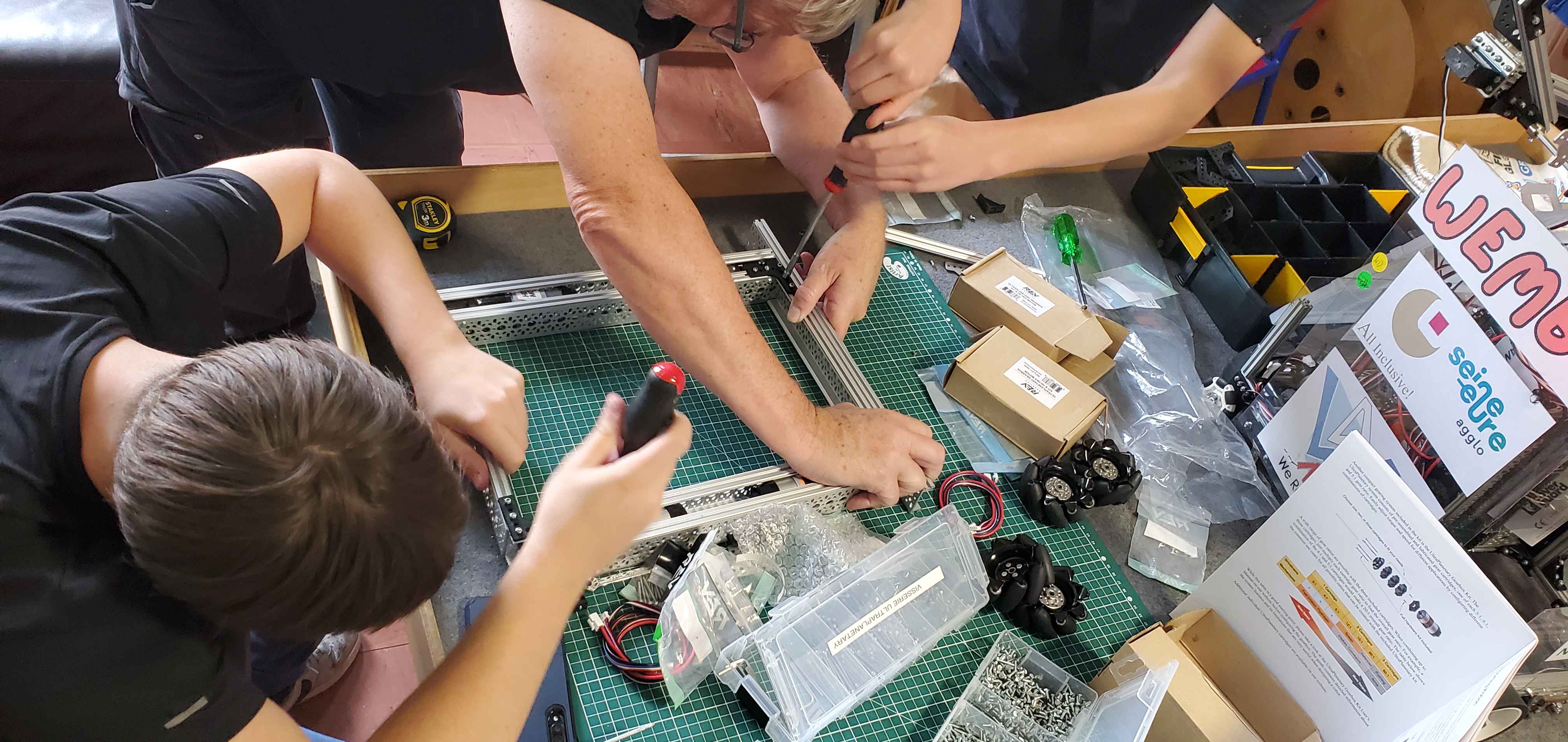
-## Choosing a rolling base with Mecanum wheels
-After analyzing the rules of the “Into The Deep” game, Team WeRobot chose a base with Mecanum wheels, enabling the robot to move smoothly in all directions. The small space around the SUBMERSIBLE ZONE and the precision required for depositing SAMPLES or attaching SPECIMENS call for a robot that is precise in its movements. The Software and Hardware divisions get to work straight away.
-
-
-
-
-
-  Left wheel Left wheel |
-  Right wheel Right wheel |
-
-
-
-
-
-
-
-
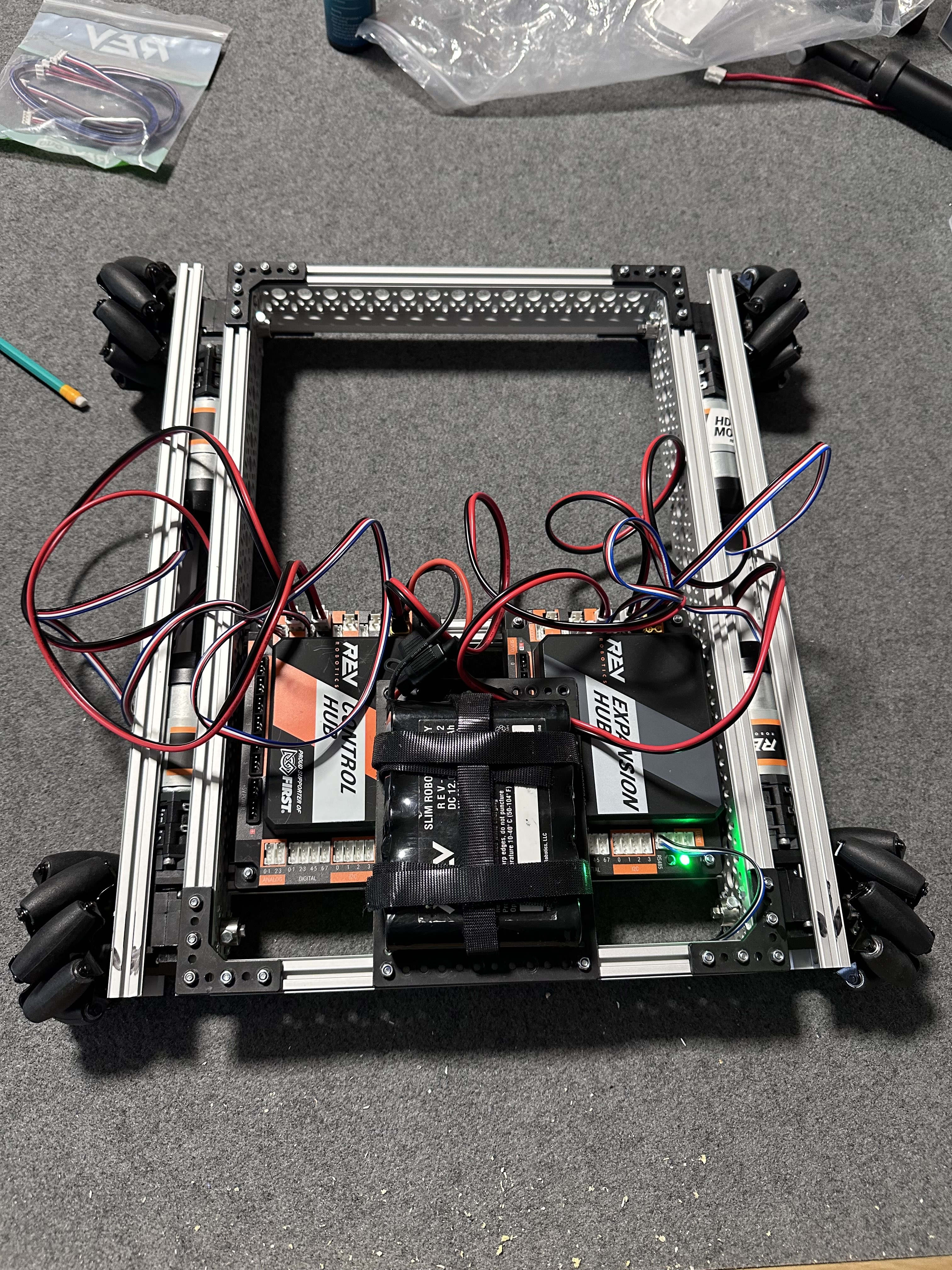
-After 4 hours of investment, the Mecanum basic prototype is ready and a draft Java program will be tested next week.
-
-
-
-
-
-